PixelCNN
PixelCNN[1] is an autoregressive generative image model that came out of DeepMind. The authors introduced 4 types of models simultaneously: RowLSTM, Diagonal BiLSTM, Multi-Scale PixelRNN and PixelCNN. While the models that were based on recurrent neural networks performed better originally, PixelCNN was a lot easier to parallelize. Over the next years a lot of improvement were done to PixelCNN, which resulted in a much better performance. In this section we will focus on the original PixelCNN implementation and look at some improvements in the coming sections.
Our PyTorch implementation is inspired by UvA Deep Learning Tutorials. We recommend you check out their tutotorial if you want to get a deeper understanding of PixelCNN and Gated PixelCNN (will be covered in the next section).
Masked Convolutions
Let's utilize a stylized example of a 4x4 image in order to understand what role masked convolutions play and why they are necessary.
We need to process the image in such a way, that the size (height and width) of the input and the output feature maps are identical. So given a 4x4 image and a 3x3 convolution, we need a padding of 1 on each side of the 2d image.
This is required, because we want to end up with a probability distribution for each pixel. For each of the 4x4 pixels we end up with a 256-way softmax layer. Each of the 256 numbers represents the probability of the pixel to be one of the 256 integer values between 0 and 255. We can use those probabilities to sample pixel values from the multinomial distribution. So in our example we would start with a greyscale image of shape 1x4x4 and end up with 256x1x4x4.
Now if you look at the kernel below, as indicated by the red dots, you will hopefully see a problem in this type of calculation. The very first output contains knowledge about future pixels. Autoregressive generative models take in previous pixels to generate future pixels. If previous pixels contain knowledge about the future, that would be considered cheating and while our training process would look great, inference would produce garbage, because the model would not have learned how to generate pixels based solely on the past.
To deal with this problem, we need to apply a mask to the kernel. Essentially we multiply the kernel values that would access future pixels with zeros, thereby zeroing out the weights of kernel positions that relate to future pixels.
There are two types of kernel masks that are used for PixelRNNs. The above mask is of type A. A type A mask zeroes out all values up to the position we would like to produceIn the below example on the other hand we use a mask of type B. A type B mask does not zero out the position in the input feature map that corresponds to the position in the output feature map.
The PixelCNN architecture uses type A masks for the input image, while type B masks are applied to all intermediary results. When we get the actual image as input and try to generate a pixel, we have to use mask A in order to hide the actual pixel the model tries to predict. So when we try to predict the very first pixel, the model can only look at zero padded values. After the first processing step with mask of type A the values do not contain actual information about the original pixel in that position, but only information about pixel values that surround the pixel we are trying to produce, so we can use mask B safely.
We create a special MaskedConvolution module, that we can reuse
in several places. The module implements a different mask depending on the type
of the mask. The padding of the convolution operation is determined automatically
based on the kernel size and dilations. Dilations are not explicitly mentioned
in the research paper, but they seem to slightly imrove the quality of the generated
images.
class MaskedConvolution(nn.Module):
def __init__(
self, in_channels, out_channels, kernel_size=(3, 3), mask_type="B", dilation=1
):
super().__init__()
assert mask_type in ["A", "B"]
mask = torch.zeros(kernel_size)
mask[: kernel_size[0] // 2, :] = 1
if mask_type == "A":
mask[kernel_size[0] // 2, : kernel_size[1] // 2] = 1
elif mask_type == "B":
mask[kernel_size[0] // 2, : kernel_size[1] // 2 + 1] = 1
self.register_buffer("mask", mask)
# add conv2d layer
padding = tuple([dilation * (size - 1) // 2 for size in kernel_size])
self.conv = nn.Conv2d(
in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
dilation=dilation,
padding=padding,
)
def forward(self, x):
with torch.inference_mode():
self.conv.weight *= self.mask
return self.conv(x)
Skip Connections
In order to facilitate training, PixelCNN utilizes skip connections, by constructing residual blocks. The residual block scales down the number of hidden features from 2h to h, before a masked 'B' convolution is applied. Afterwards the dimension is scaled up again and the original input to the block and the output are summed.
Additionally to the behaviour described above, we add BatchNorm2d before each activation function. This helps out with the training stability
and overfitting.
class ResidualBlock(nn.Module):
def __init__(self, hidden_dim, dilation=1):
super().__init__()
self.block = nn.Sequential(
nn.Conv2d(
in_channels=hidden_dim * 2, out_channels=hidden_dim, kernel_size=1
),
nn.BatchNorm2d(hidden_dim),
nn.ReLU(),
MaskedConvolution(
in_channels=hidden_dim, out_channels=hidden_dim, dilation=dilation
),
nn.BatchNorm2d(hidden_dim),
nn.ReLU(),
nn.Conv2d(
in_channels=hidden_dim, out_channels=hidden_dim * 2, kernel_size=1
),
nn.BatchNorm2d(hidden_dim * 2),
nn.ReLU(),
)
def forward(self, x):
block = self.block(x)
return x + blockModel
At this point we have all the ingredients to describe a PixelCNN architecture. We use a 7x7 masked convolutional layer of type 'A' to the input image. The output is followed up by 7 residual blocks, which utilize masked convolutions of type 'B'. The final outputs adjust the number of feature maps to the desired 256 and the softmax nonlinearity is applied.
We add different types of dialitions for each ResidialBlock to allow the model to attend to pixels, that are farther away from the current position. You can experiment with those values to see if you can achieve better results.
class PixelCNN(nn.Module):
def __init__(self, hidden_dim):
super().__init__()
self.layers = nn.Sequential(
MaskedConvolution(
in_channels=1,
out_channels=hidden_dim * 2,
kernel_size=(7, 7),
mask_type="A",
),
nn.BatchNorm2d(hidden_dim * 2),
nn.ReLU(),
ResidualBlock(hidden_dim, dilation=1),
ResidualBlock(hidden_dim, dilation=2),
ResidualBlock(hidden_dim, dilation=1),
ResidualBlock(hidden_dim, dilation=3),
ResidualBlock(hidden_dim, dilation=1),
ResidualBlock(hidden_dim, dilation=2),
ResidualBlock(hidden_dim, dilation=1),
nn.Conv2d(hidden_dim * 2, hidden_dim * 2, kernel_size=1),
nn.BatchNorm2d(hidden_dim * 2),
nn.ReLU(),
nn.Conv2d(hidden_dim * 2, 256, kernel_size=1),
)
def forward(self, x):
x = self.layers(x)
x = x.view(-1, 256, 1, 28, 28)
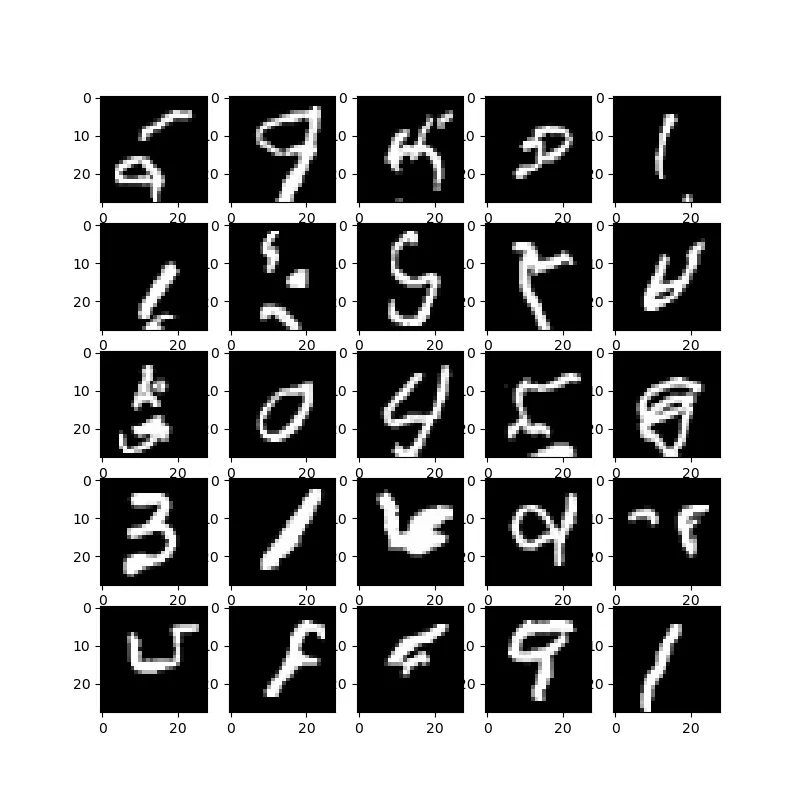
return xThe qualityt of the generated images is far from optimal. Some of the images actually correspond to digits, others look 'digit-like', but overall there is room for improvement. Gated PixelCNNs will allow us to generate higher quality images. This is going to be the topic of the next section.