LeNet-5
LeNet-5[1] is simultaneouly one of the oldest and the most well known convolutional neural network architecture. The name LeNet-5 is a reference to the inventor of the network, Yann LeCun, considered to be one of the grandfathers of deep learning. The network was designed for image recognition and was extensively used with the MNIST dataset. We can not expect this architecture to produce state of the art results, but this is a good exercise and a great starting point in our study of cnn architectures.
The table below depicts the architecure of the LeCun-5 network. First we apply 3 convolutional layers and 2 average pooling layers. After the third convolutional layer we flatten the feature maps and use two fully connected layers. We use the tanh activation function for all convolutional and fully connected layers, only the last fully connected layer uses the softmax activation function.
| Layer | Input Size | Kernel Size | Stride | Padding | Feature Maps | Output Size |
|---|---|---|---|---|---|---|
| Conv | 28x28x1 | 5x5 | 1 | 2 | 6 | 28x28x6 |
| Tanh | - | - | - | - | - | - |
| Avg. Pooling | 28x28x6 | 2x2 | 2 | 0 | - | 14x14x6 |
| Conv | 14x14x6 | 5x5 | 1 | 0 | 16 | 10x10x16 |
| Tanh | - | - | - | - | - | - |
| Avg. Pooling | 10x10x16 | 2x2 | 2 | 0 | - | 5x5x16 |
| Conv | 5x5x6 | 5x5 | 1 | 0 | 120 | 1x1x120 |
| Tanh | - | - | - | - | - | - |
| FC | 120 | - | - | - | - | 84 |
| Tanh | - | - | - | - | - | - |
| FC | 84 | - | - | - | - | 10 |
| Softmax | 10 | - | - | - | - | 10 |
Below we implement LeNet-5 in PyTorch. There are no new pieces in the code below, all the piece swere already covered in previous sections.
from sklearn.model_selection import train_test_split
import time
import torch
from torch import nn, optim
from torch.utils.data import DataLoader, Subset
from torchvision.datasets.mnist import MNIST
from torchvision import transforms as T
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# -----------------------------------
# DATASETS and DATALOADERS
# -----------------------------------
# get MNIST data
train_val_dataset = MNIST(
root="../datasets", download=True, train=True, transform=T.ToTensor()
)
test_dataset = MNIST(
root="../datasets", download=False, train=False, transform=T.ToTensor()
)
# split dataset into train and validate
indices = list(range(len(train_val_dataset)))
train_idxs, val_idxs = train_test_split(
indices, test_size=0.1, stratify=train_val_dataset.targets.numpy()
)
train_dataset = Subset(train_val_dataset, train_idxs)
val_dataset = Subset(train_val_dataset, val_idxs)
batch_size = 32
train_dataloader = DataLoader(
dataset=train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=4,
drop_last=True,
)
val_dataloader = DataLoader(
dataset=val_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=4,
drop_last=False,
)
test_dataloader = DataLoader(
dataset=test_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=4,
drop_last=False,
)The model is an exact implementation of the table above.
# -----------------------------------
# LeNet-5 Model
# -----------------------------------
class Model(nn.Module):
def __init__(self):
super().__init__()
self.feature_extractor = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, padding=2),
nn.Tanh(),
nn.MaxPool2d(kernel_size=2),
nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5, padding=0),
nn.Tanh(),
nn.MaxPool2d(kernel_size=2),
nn.Conv2d(in_channels=16, out_channels=120, kernel_size=5, padding=0),
nn.Tanh(),
)
self.classifier = nn.Sequential(
nn.Flatten(),
nn.Linear(in_features=120, out_features=84),
nn.Tanh(),
nn.Linear(in_features=84, out_features=10),
)
def forward(self, x):
features = self.feature_extractor(x)
logits = self.classifier(features)
return logits# -----------------------------------
# CALCULATE PERFORMANCE
# -----------------------------------
def track_performance(dataloader, model, criterion):
# switch to evaluation mode
model.eval()
num_samples = 0
num_correct = 0
loss_sum = 0
# no need to calculate gradients
with torch.inference_mode():
for _, (features, labels) in enumerate(dataloader):
with torch.autocast(device_type="cuda", dtype=torch.float16):
features = features.to(device)
labels = labels.to(device)
logits = model(features)
predictions = logits.max(dim=1)[1]
num_correct += (predictions == labels).sum().item()
loss = criterion(logits, labels)
loss_sum += loss.cpu().item()
num_samples += len(features)
# we return the average loss and the accuracy
return loss_sum / num_samples, num_correct / num_samples# -----------------------------------
# TRAIN
# -----------------------------------
def train(
num_epochs,
train_dataloader,
val_dataloader,
model,
criterion,
optimizer,
scheduler=None,
):
model.to(device)
scaler = torch.cuda.amp.GradScaler()
for epoch in range(num_epochs):
start_time = time.time()
for _, (features, labels) in enumerate(train_dataloader):
model.train()
features = features.to(device)
labels = labels.to(device)
# Empty the gradients
optimizer.zero_grad()
with torch.autocast(device_type="cuda", dtype=torch.float16):
# Forward Pass
logits = model(features)
# Calculate Loss
loss = criterion(logits, labels)
# Backward Pass
scaler.scale(loss).backward()
# Gradient Descent
scaler.step(optimizer)
scaler.update()
val_loss, val_acc = track_performance(val_dataloader, model, criterion)
end_time = time.time()
s = (
f"Epoch: {epoch+1:>2}/{num_epochs} | "
f"Epoch Duration: {end_time - start_time:.3f} sec | "
f"Val Loss: {val_loss:.5f} | "
f"Val Acc: {val_acc:.3f} |"
)
print(s)
if scheduler:
scheduler.step(val_loss)We use the vanilla gradient descent optimizer, as was done in the original paper.
model = Model()
optimizer = optim.SGD(params=model.parameters(), lr=0.01)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, factor=0.1, patience=2, verbose=True
)
criterion = nn.CrossEntropyLoss(reduction="sum")Using a LeNet-5 ConvNet allows us to achieve the best performance so far. We are close to 99% accuracy on the validation dataset. We could theoretically squeeze out a little more performance by for example utilizing data augmentation, but this is good enough for MNIST. We consider this task as solved and will focus on harder datasets in the next sections to demonstrate the usefulnes of more modern convolutional architectures.
train(
num_epochs=10,
train_dataloader=train_dataloader,
val_dataloader=val_dataloader,
model=model,
criterion=criterion,
optimizer=optimizer,
scheduler=scheduler,
)Epoch: 1/10 | Epoch Duration: 8.358 sec | Val Loss: 0.07504 | Val Acc: 0.978 |
Epoch: 2/10 | Epoch Duration: 7.312 sec | Val Loss: 0.05162 | Val Acc: 0.984 |
Epoch: 3/10 | Epoch Duration: 7.049 sec | Val Loss: 0.04810 | Val Acc: 0.984 |
Epoch: 4/10 | Epoch Duration: 7.019 sec | Val Loss: 0.04933 | Val Acc: 0.985 |
Epoch: 5/10 | Epoch Duration: 7.180 sec | Val Loss: 0.04957 | Val Acc: 0.987 |
Epoch: 6/10 | Epoch Duration: 7.215 sec | Val Loss: 0.04996 | Val Acc: 0.988 |
Epoch 00006: reducing learning rate of group 0 to 1.0000e-03.
Epoch: 7/10 | Epoch Duration: 7.212 sec | Val Loss: 0.03751 | Val Acc: 0.990 |
Epoch: 8/10 | Epoch Duration: 7.243 sec | Val Loss: 0.03633 | Val Acc: 0.989 |
Epoch: 9/10 | Epoch Duration: 7.464 sec | Val Loss: 0.03620 | Val Acc: 0.989 |
Epoch: 10/10 | Epoch Duration: 7.253 sec | Val Loss: 0.03639 | Val Acc: 0.989 |In the next couple of sections we are going to focus on the so called CIFAR-10 dataset. Torchvision provides the dataset out of the box, so let's get the data and prepare the dataloaders.
from torchvision.datasets.cifar import CIFAR10train_val_dataset = CIFAR10(root='../datasets', download=True, train=True, transform=T.ToTensor())
test_dataset = CIFAR10(root='../datasets', download=False, train=False, transform=T.ToTensor())# split dataset into train and validate
indices = list(range(len(train_val_dataset)))
train_idxs, val_idxs = train_test_split(
indices, test_size=0.1, stratify=train_val_dataset.targets
)
train_dataset = Subset(train_val_dataset, train_idxs)
val_dataset = Subset(train_val_dataset, val_idxs)batch_size = 32
train_dataloader = DataLoader(
dataset=train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=4,
drop_last=True,
)
val_dataloader = DataLoader(
dataset=val_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=4,
drop_last=False,
)
test_dataloader = DataLoader(
dataset=test_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=4,
drop_last=False,
)This dataset consists of 45,000 training images, 5,000 validation images and 10,000 testing images. The images are of size 32x32 pixels and are colored, so unlike MNIST we are dealing with a 3-channel input.
Once again we are dealing with a classification problem with 10 distinct labels.
classes = ('plane', 'car', 'bird', 'cat','deer',
'dog', 'frog', 'horse', 'ship', 'truck')While the image size is fairly similar to MNIST, the task is significantly more complex than MNIST. Look at the images below. Unlike MNIST, CIFAR-10 consits of real-life images. The dataset is much more diverse. Often you see the objects from different angles or distances. The objects often have different colors. Moreover the images contain different types of backgrounds. Getting a good accuracy is going to be a fairly challenging task.
fig = plt.figure(figsize=(6, 8))
columns = 4
rows = 5
for i in range(1, columns*rows +1):
img, cls = train_val_dataset[i]
fig.add_subplot(rows, columns, i)
plt.imshow(img.permute(1, 2, 0).numpy())
plt.title(classes[cls])
plt.axis('off')
plt.show()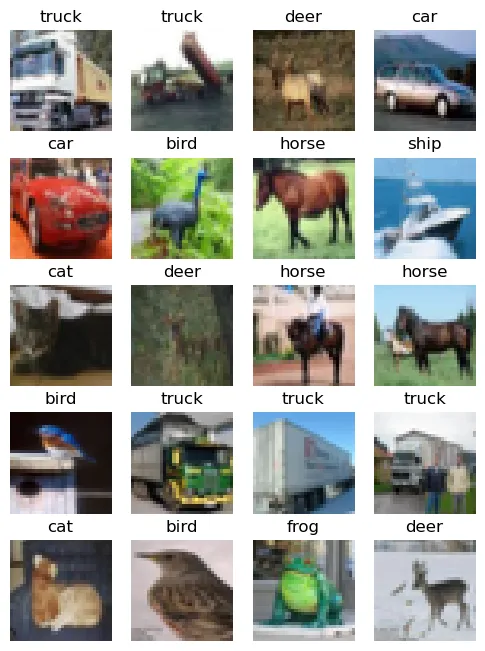
Let's use the LeCun-5 architecture, in order to create a simple baseline, that we should try to beat with more modern architectures in the next sections.
Our model is very similar, but not identical. First, the input channels for
the very first convolutional layer were increased in order to account for
the colored images. Second, we introduced the AdaptiveAvgPool2d
layer with the output size of (1,1). This layer applies an average pooling, such
that the width and height of the image are equal to a given size, in our case
we reduce the image to just 1x1 pixel. We do that, because the parameters we
have chosen below correspond to an 28x28 MNIST image and when we input a 32x32
image, we are left with more than 120 parameters. This layer is often use to
make one single architecture compatible with different image sizes.
# -----------------------------------
# LeNet-5 Model
# -----------------------------------
class Model(nn.Module):
def __init__(self):
super().__init__()
self.feature_extractor = nn.Sequential(
# inputut channels equals to 3
nn.Conv2d(in_channels=3, out_channels=6, kernel_size=5, padding=2),
nn.Tanh(),
nn.MaxPool2d(kernel_size=2),
nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5, padding=0),
nn.Tanh(),
nn.MaxPool2d(kernel_size=2),
nn.Conv2d(in_channels=16, out_channels=120, kernel_size=5, padding=0),
nn.Tanh(),
)
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
self.classifier = nn.Sequential(
nn.Flatten(),
nn.Linear(in_features=120, out_features=84),
nn.Tanh(),
nn.Linear(in_features=84, out_features=10),
)
def forward(self, x):
x = self.feature_extractor(x)
x = self.avgpool(x)
x = self.classifier(x)
return xLet's pretend for a second, that we did'n include the AdaptiveAvgPool2d module. In that case the feature extractor produces an image of size 2x2.
with torch.inference_mode():
x = torch.randn(1, 3, 32, 32).to(device)
x = model.feature_extractor(x)
print(x.shape)torch.Size([1, 120, 2, 2])After flattening the image, we would end up with 120x2x2 features, while the
linear layer expects exactly 120. The avgpool on the other hand
always reduces the image to a size of 1x1, no matter if the input is 2x2, 3x3
or of any other dimension.
As usual, we create our model, optimizer, scheduler and criterion and train the model.
model = Model()
optimizer = optim.SGD(params=model.parameters(), lr=0.01)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, factor=0.1, patience=5, verbose=True
)
criterion = nn.CrossEntropyLoss(reduction="sum")train(
num_epochs=30,
train_dataloader=train_dataloader,
val_dataloader=val_dataloader,
model=model,
criterion=criterion,
optimizer=optimizer,
scheduler=scheduler,
)Epoch: 1/30 | Epoch Duration: 4.378 sec | Val Loss: 1.55044 | Val Acc: 0.432 |
Epoch: 2/30 | Epoch Duration: 4.689 sec | Val Loss: 1.39773 | Val Acc: 0.495 |
Epoch: 3/30 | Epoch Duration: 4.552 sec | Val Loss: 1.31610 | Val Acc: 0.529 |
Epoch: 4/30 | Epoch Duration: 4.434 sec | Val Loss: 1.35375 | Val Acc: 0.525 |
Epoch: 5/30 | Epoch Duration: 4.521 sec | Val Loss: 1.27864 | Val Acc: 0.546 |
Epoch: 6/30 | Epoch Duration: 4.576 sec | Val Loss: 1.26108 | Val Acc: 0.554 |
Epoch: 7/30 | Epoch Duration: 4.523 sec | Val Loss: 1.35097 | Val Acc: 0.521 |
Epoch: 8/30 | Epoch Duration: 4.492 sec | Val Loss: 1.25061 | Val Acc: 0.566 |
Epoch: 9/30 | Epoch Duration: 4.675 sec | Val Loss: 1.27933 | Val Acc: 0.549 |
Epoch: 10/30 | Epoch Duration: 4.565 sec | Val Loss: 1.25053 | Val Acc: 0.557 |
Epoch: 11/30 | Epoch Duration: 4.760 sec | Val Loss: 1.25920 | Val Acc: 0.571 |
Epoch: 12/30 | Epoch Duration: 4.596 sec | Val Loss: 1.32838 | Val Acc: 0.540 |
Epoch: 13/30 | Epoch Duration: 4.581 sec | Val Loss: 1.31666 | Val Acc: 0.546 |
Epoch: 14/30 | Epoch Duration: 4.478 sec | Val Loss: 1.27574 | Val Acc: 0.564 |
Epoch 00014: reducing learning rate of group 0 to 1.0000e-03.
Epoch: 15/30 | Epoch Duration: 4.667 sec | Val Loss: 1.17661 | Val Acc: 0.594 |
Epoch: 16/30 | Epoch Duration: 4.651 sec | Val Loss: 1.18592 | Val Acc: 0.599 |
Epoch: 17/30 | Epoch Duration: 4.693 sec | Val Loss: 1.20123 | Val Acc: 0.598 |
Epoch: 18/30 | Epoch Duration: 4.533 sec | Val Loss: 1.21307 | Val Acc: 0.595 |
Epoch: 19/30 | Epoch Duration: 4.688 sec | Val Loss: 1.23074 | Val Acc: 0.597 |
Epoch: 20/30 | Epoch Duration: 4.423 sec | Val Loss: 1.23757 | Val Acc: 0.596 |
Epoch: 21/30 | Epoch Duration: 4.837 sec | Val Loss: 1.26319 | Val Acc: 0.593 |
Epoch 00021: reducing learning rate of group 0 to 1.0000e-04.
Epoch: 22/30 | Epoch Duration: 4.638 sec | Val Loss: 1.25713 | Val Acc: 0.595 |
Epoch: 23/30 | Epoch Duration: 4.472 sec | Val Loss: 1.25976 | Val Acc: 0.593 |
Epoch: 24/30 | Epoch Duration: 4.450 sec | Val Loss: 1.26443 | Val Acc: 0.596 |
Epoch: 25/30 | Epoch Duration: 5.288 sec | Val Loss: 1.26758 | Val Acc: 0.597 |
Epoch: 26/30 | Epoch Duration: 4.750 sec | Val Loss: 1.27124 | Val Acc: 0.596 |
Epoch: 27/30 | Epoch Duration: 4.771 sec | Val Loss: 1.27477 | Val Acc: 0.596 |
Epoch 00027: reducing learning rate of group 0 to 1.0000e-05.
Epoch: 28/30 | Epoch Duration: 4.605 sec | Val Loss: 1.27532 | Val Acc: 0.596 |
Epoch: 29/30 | Epoch Duration: 5.403 sec | Val Loss: 1.27567 | Val Acc: 0.596 |
Epoch: 30/30 | Epoch Duration: 4.882 sec | Val Loss: 1.27617 | Val Acc: 0.596 |After 30 epochs we reach an accuracy of roughly 60% This is the number we have to beat.